Saat robot humanoid bergerak dari laboratorium penelitian ke pabrik, rumah sakit, dan lingkungan layanan, satu pertanyaan utama muncul:apa yang memungkinkan mesin-mesin ini bergerak, berpikir, dan berinteraksi dengan sangat tepat?
Dibalik setiap robot humanoid ada jaringan komplekssistem manajemen daya, drive motor, sirkuit kontrol EMI, dan konverter DC-DC efisiensi tinggiSemua ini sangat bergantung pada komponen magnetik canggih.
Untuk produsen komponen sepertiShinhom, evolusi cepat dari robotika humanoid merupakan kesempatan yang signifikan untuk mendukung sistem tenaga robot generasi berikutnya.
Mengapa Robot Humanoid Membutuhkan Daya Magnetik Lanjutan
Robot humanoid secara mendasar berbeda dari robot industri tradisional.
-
Servo motor multi-torsi tinggi
-
Sistem kontrol waktu nyata
-
Operasi efisiensi tinggi bertenaga baterai
-
Tata letak internal yang kompak
-
Kompatibilitas elektromagnetik ketat (EMC)
Setiap sendi dalam robot humanoid mungkin berisi driver motor dan papan kontrol sendiri.
Singkatnya, robot humanoid pada dasarnya adalah platform elektronik daya mobile.
Efisiensi Tenaga: Tantangan Kritis dalam Robotika Humanoid
Kehidupan baterai adalah salah satu tantangan teknis terbesar dalam pengembangan robot humanoid.
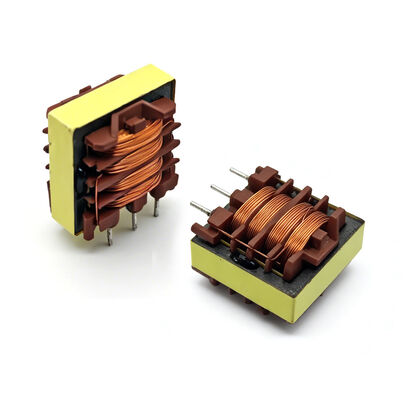
Komponen magnet kinerja tinggi sepertiInduktor kawat datar, trafo frekuensi tinggi, dan filter EMI presisi membantu mengurangi kerugian switching dan meningkatkan kepadatan daya secara keseluruhan.
Resistensi DC yang lebih rendah (DCR) dalam induktor, bahan inti yang dioptimalkan, dan disipasi panas yang ditingkatkan semuanya berkontribusi pada waktu berjalan baterai yang diperpanjang sebuah keuntungan penting dalam aplikasi humanoid.
Pengendalian EMI dalam Sistem Robot yang Kompleks
Robot humanoid mengintegrasikan:
Subsistem ini menghasilkan gangguan elektromagnetik yang dapat mengganggu akurasi kontrol dan stabilitas komunikasi.
Dirancang dengan benarFilter EMI, inti ferrit, dan pencekik modus umumsangat penting untuk menjaga integritas sinyal dan kepatuhan sistem.
Oleh karena itu komponen magnet memainkan peran langsung dalam memastikan:
-
Pengendalian gerak stabil
-
Umpan balik sensor yang akurat
-
Komunikasi nirkabel yang handal
-
Kepatuhan terhadap peraturan EMC
Desain Kompak Memerlukan Kapadatan Daya Tinggi
Robot humanoid harus mengintegrasikan elektronik canggih ke dalam ruang internal yang terbatas sambil mempertahankan distribusi berat yang seimbang.
Hal ini menciptakan permintaan untuk:
Struktur magnetik yang dioptimalkan memungkinkan para insinyur untuk mengurangi jejak PCB sambil mempertahankan kapasitas arus yang tinggi - persyaratan utama dalam modul kontrol sendi robot.
Solusi Magnetik Khusus untuk Robotika
Tidak seperti elektronik konsumen standar, robot humanoid sering membutuhkan komponen magnetik yang disesuaikan karena:
-
Tata letak mekanis yang unik
-
Persyaratan tegangan khusus
-
Kondisi beban dinamis tinggi
-
Batasan termal yang ketat
Produsen yang mampu menawarkanSolusi magnetik khusus, struktur inti yang fleksibel, dan teknologi lilitan yang dioptimalkan lebih baik untuk mendukung inovasi robotika.
Peluang Pasar yang Tumbuh
Saat robot humanoid berkembang menjadi:
-
Otomatisasi industri
-
Bantuan kesehatan
-
Robot layanan
-
Platform Penelitian
permintaan untuk komponen magnet yang dapat diandalkan dan efisien akan terus meningkat.
Pemasok komponen yang mengertiArsitektur tenaga robotakan menjadi mitra strategis dalam memungkinkan mesin cerdas generasi berikutnya.
Kesimpulan
Robot humanoid mewakili salah satu segmen yang paling cepat berkembang dalam robotika canggih.komponen magnet yang efisien, kompak, dan dapat diandalkan.
Dengan mendukung konversi daya arus tinggi, penekanan EMI, dan stabilitas termal, magnetik canggih membentuk tulang punggung tersembunyi dari robotika humanoid.
Seiring industri robotika meningkat, inovasi komponen magnet akan memainkan peran penting dalam mendorong masa depan kolaborasi manusia-mesin.

 Pesan Anda harus antara 20-3.000 karakter!
Pesan Anda harus antara 20-3.000 karakter!